The upper section of the CIGI Packet definition is reserved for Sending messages from host (vsTASKER simulation engine) to the IG.
We will create and explain the View Definition message. All other messages will follow the same principle.
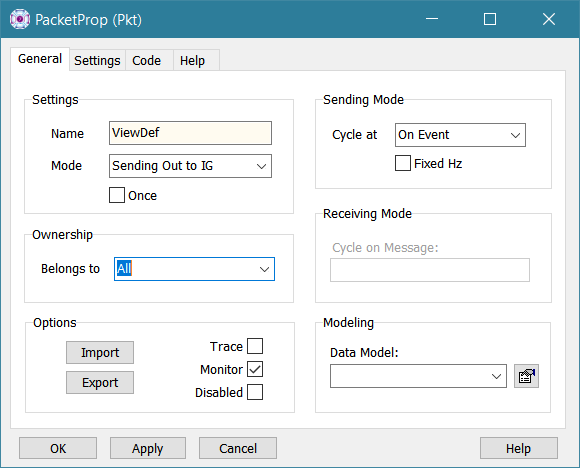
First, let's create the Packet in the upper section and set it up like below:
Now, in the , let's add the following code:
In order to allow the user to set the values of some variables of the def object, we can define them specifically for the dynamic data interface.
To simplify, we will just let the user specify the view id and the fields of view. All the other values will be defaulted by the Packet.
Below the declaration above, add the following code:
|
public:
int view_id; //&& DEF[0]
float h_fov; //&& LBL[Horizontal FoV] DEF[90] UNIT[deg]
float v_fov; //&& LBL[Vertical FoV] DEF[70] UNIT[deg]
|
Now, below, let's add two methods. One for setting the view and the other one for updating the def class with user and default data.
|
public:
void setCurrentView();
void changeView(int new_id, float h, float v);
private:
void setupParams();
|
In the panel, we call the setupParams function:
|
case RESET: {
setupParams();
} break;
|
In the panel, we define our two declared functions (explanations in the code below):
|
void Pkt::setCurrentView()
{
CGI:view_id = this->view_id; // store globally (at the CIGI settings level) the selected view
tic(); // send the message
}
void Pkt::changeView(int new_id, float h, float v)
{
view_id = new_id; // replace the current id
h_fov = h; // replace the horizontal fov
v_fov = v; // replace the vertical fov
setupParams(); // send the data to the def object
setCurrentView(); // send the object to the IG
}
void Pkt::setupParams() // send the local user data to the def object
{
def.SetViewID(view_id);
def.SetGroupID(0);
def.SetFOVLeftEn(true);
def.SetFOVRightEn(true);
def.SetFOVTopEn(true);
def.SetFOVBottomEn(true);
def.SetFOVLeft(-h_fov/2);
def.SetFOVRight(+h_fov/2);
def.SetFOVTop(+v_fov/2);
def.SetFOVBottom(-v_fov/2);
def.SetFOVNearEn(true);
def.SetFOVFarEn(true);
def.SetFOVNear(0);
def.SetFOVFar(10000);
def.SetProjectionType(def.ProjectionTypeGrp::Perspective);
}
|
Now, in the (part called at the frequency specified in the Packet settings - here, manually or OnEvent), let's send the message:
|
*mgr->OmsgPtr << def;
mgr->nb_pkt++;
return DONE;
|