VegaPrime viewer facilitates the integration of vsTASKER simulation engine with Presagis VegaPrime IG.
The Viewer will combine VegaPrime library with vsTASKER runtime libraries, outputting a unique (and possibly standalone) application.
In this sample, we will use an existing VegaPrime terrain (town) to put a tank on the scenario and control it.
Create a new Database from the VegaPrime template.
Select Basic scenario template.
Then save it under the name test_vprime.
Load the OpenFlight town.opf terrain file, in Environment::Terrain::OpenFlt:
On the terrain map, drop the default entity in the middle of the road intersection:
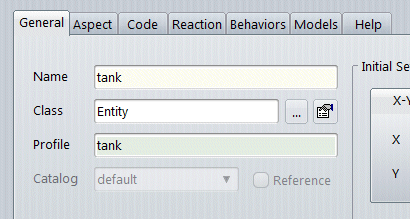
On its property window, rename the entity "tank" and also, put "tank" on its Profile. This profile identification will be use at runtime to load from the acf file the correct 3D model (see below).
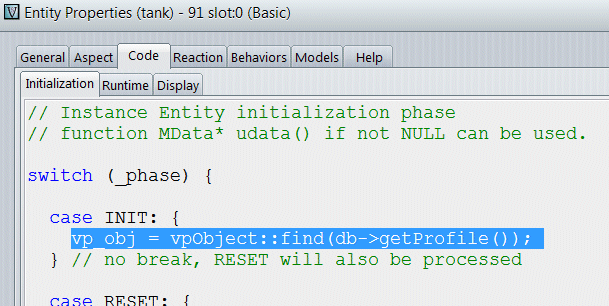
It is convenient to use the Profile text field but this is not mandatory. The way the template entity use it at initialization time is written in the entity Code Initialization panel:
Now, add a VegaPrime Player and select, as an ACF file, the provided town.acf located in /runtime/vegaprime.
Use

button to open
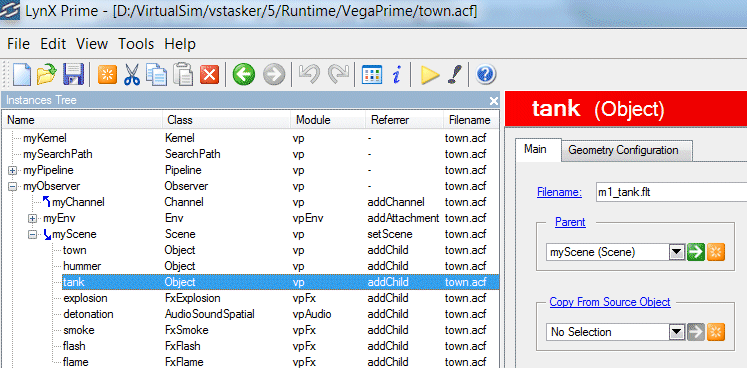
Presagis/Vega_Prime_3/bin/LynxPrime.exeYou will notice that tank model has been defined.
If you need to add or prepare mode 3D models or effects, just add them in the ACF file and use them from inside vsTASKER:
Save and build the simulation engine then run it.
You will get the tank put at the exact location on the 3D view.
Use the mouse to control the camera and the entity hook window to make it move on the scene.
|
|
For a better clamping of the tank, change its dynamic model from LinearDyn to LandDyn and select Clamped to true.
|