Beside of using
logics and
knowledge, it sometimes very useful to draw on the map where to go, how to get there or what to do when getting there.
Plan is covering this functionality.
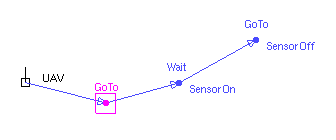
A Plan is a string of
Plan-Points, normally geolocalized (but some are not) that refer to existing
routines.
The same way as behavior objects are referring to existing logics (knowledge or models), plan-points refer to existing routine.
When the simulation starts, the first routine of the entity plan is also executed (at the specified frequency).
The routine can perform any process (checking the speed, the position of the entity regarding the plan-point position, raising events or whatever computing).
As soon as the routine returns Done, the next following routine is automatically started, until this one returns Done, etc, until the end of the plan.
-
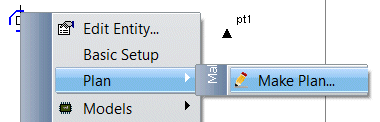
First, create a plan by selecting one Entity, then right click:
Once the mouse cursor changes to + select on the map the first plan-point to create.
-
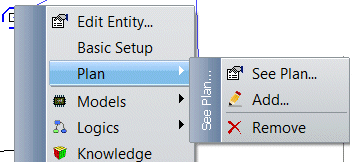
Once a Plan is created, you can:
: property window of the Plan
: append a new plan-point at the end of the actual plan. Click on the map to create.
Remove: delete the whole plan.
-
Any plan-point can be selected, displaced, edited or deleted. Right click the plan-point:
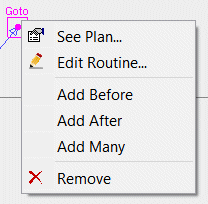
property window of the Plan
: property window of the plan-point routine
: insert a new plan-point before the selected one (click on the map to create)
: insert a new plan-point before the selected one (click on the map to create)
: duplicate the selected one as many times as clicked on the map. Right click and Done to stop or use keyboard ESC key.
: suppress the selected plan-point